RGB工业相机的色度学标定:从拍照设备到测量仪器的跨越#
引言:当工业相机遇见色度学#
在汽车氛围灯质量检测、LED显示屏均匀性评估、以及照明产品色温一致性管控等应用场景中,工程师面临一个核心问题:如何以低成本、高通量的方式获取被测对象的二维亮度与色度分布信息?
传统的解决方案是使用基于**三刺激值滤光片(Tristimulus Filter)**的专业成像色度计。这类仪器通过在传感器前端放置精密设计的CIE匹配滤光片,在硬件层面直接模拟人眼的光谱响应函数,从而实现高精度的色度测量。然而,其高昂的设备成本(通常数十万元人民币起步)和有限的空间分辨率,使得许多中小规模项目望而却步。
近年来,一种替代思路逐渐成熟:利用普通的RGB工业相机,通过严格的色度学标定流程,将其从单纯的图像记录设备转变为能够输出物理量(亮度和色坐标)的测量仪器。这一过程的核心,是建立相机设备相关的RGB数字信号与CIE标准色度空间之间精确的数学映射关系。
本文将以第一性原理为出发点,系统剖析这一标定过程涉及的关键环节:从Bayer传感器的光谱响应表征,到原始数据的线性化预处理,再到RGB-XYZ映射模型的选择与训练。文章将客观分析各类标定方案的适用条件与精度边界,帮助读者建立对RGB相机色度标定技术完整而清醒的认知。
理解起点:相机RGB响应的物理本质#
Bayer传感器的工作原理#
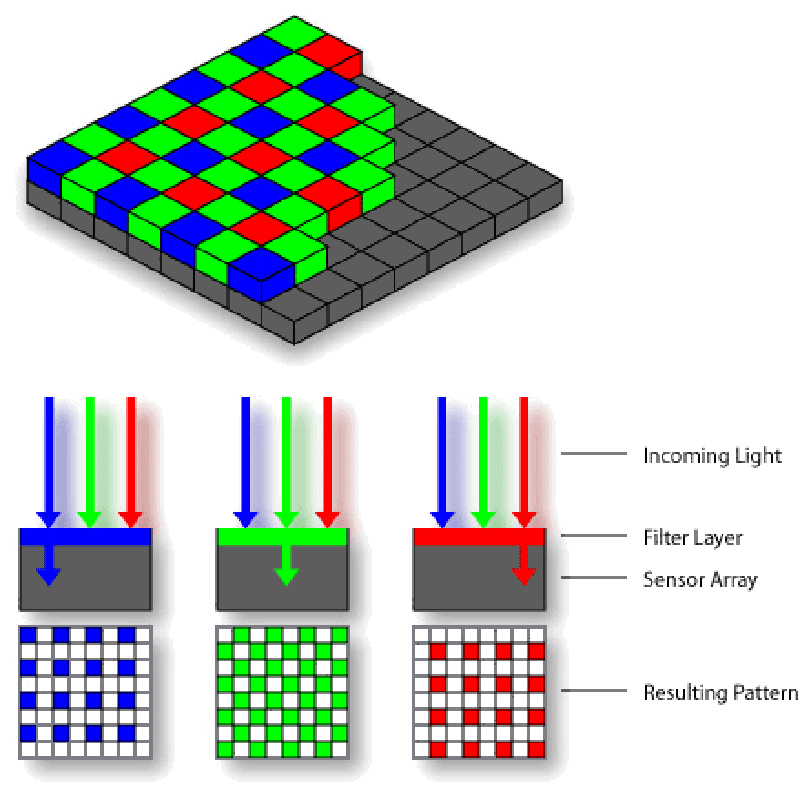
RGB工业相机的核心成像元件是覆盖有彩色滤光阵列(Color Filter Array, CFA)的CMOS或CCD图像传感器。最常见的CFA排列方式是拜耳阵列(Bayer Array),由红(R)、绿(G)、蓝(B)三种染料滤色单元按特定模式排列组成——其中绿色像素占总像素数的一半,以模拟人眼对绿光更高的亮度敏感度。
每个像素点仅能记录通过其上方滤色片的特定光谱带内的光强度信息。由Bayer阵列获得的原始图像数据(RAW数据)是一个马赛克状的灰度图,需要通过**去马赛克算法(Demosaicing)**插值才能为每个像素生成完整的R、G、B三通道数值。
设备相关的色彩空间#
理解RGB相机标定的第一步,是认识到相机输出的R、G、B数值是设备相关的(Device-Dependent)。这意味着:
- 不同厂商、不同型号的相机,对同一颜色的光会产生不同的RGB数值
- 相机的RGB滤光片光谱透过率由染料配方和镀膜工艺决定,无法与任何标准色彩空间直接对应
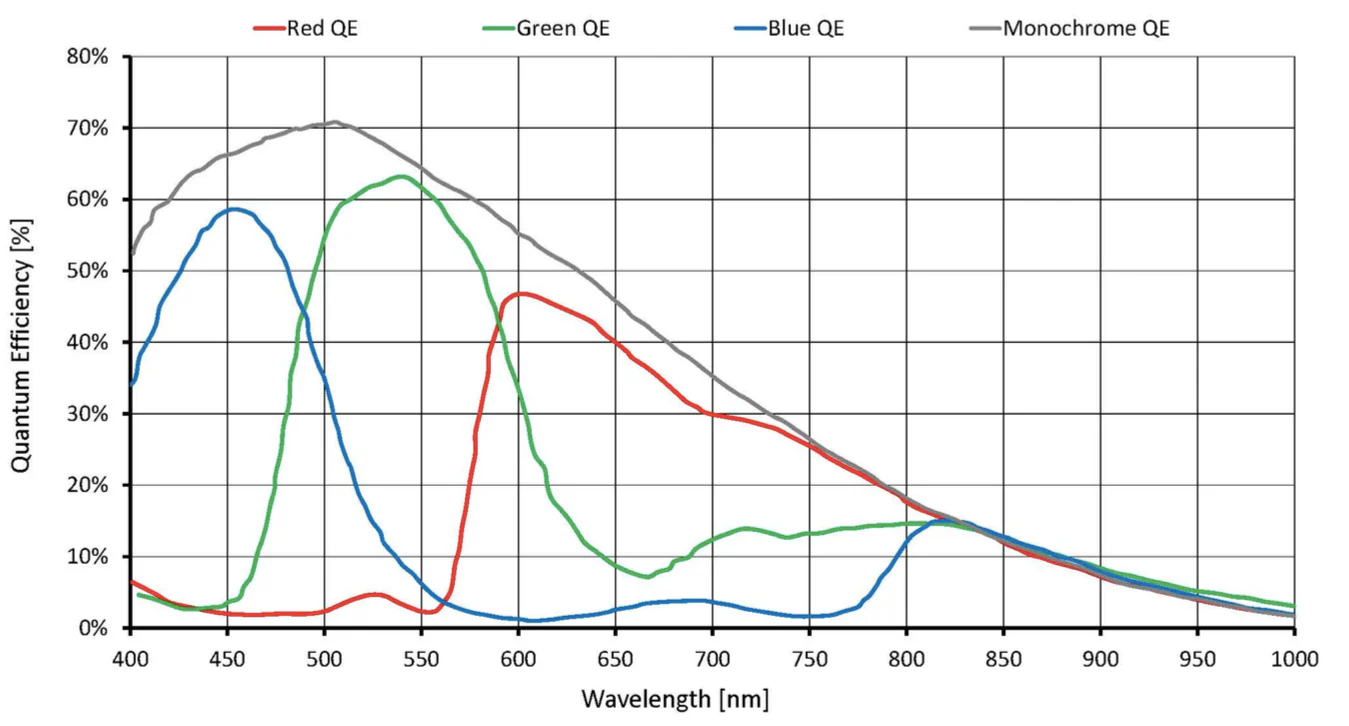
- 同一相机的RGB响应还受到传感器量子效率(Quantum Efficiency, QE)、镜头光谱透过率、以及系统增益设置的综合影响
CIE XYZ:色度学的通用语言#
与设备相关的RGB空间相对应的,是国际照明委员会(CIE)于1931年定义的XYZ标准色度系统。该系统基于标准观察者的颜色匹配函数 \(\bar{x}(\lambda)\)、\(\bar{y}(\lambda)\)、\(\bar{z}(\lambda)\) 建立,是国际公认的色彩量化基准。其中:
- Y三刺激值直接对应人眼感知的亮度(Luminance)
- 色坐标 \((x, y)\) 由三刺激值的比值定义:\(x = X/(X+Y+Z)\),\(y = Y/(X+Y+Z)\)
- 任何光源或表面色都可以在CIE色度图上用唯一的点来表示
色度标定的本质,就是建立一个从相机"方言"般的RGB值到色度学"通用语言"XYZ值的精确翻译函数。
标定前的基础工程:辐射度预处理#
在建立RGB到XYZ的色度映射之前,必须首先确保相机输出的RGB信号是忠实反映入射光能量的线性信号。这一步骤称为辐射度标定(Radiometric Calibration),其目标是消除传感器固有的系统性偏差。
黑电平校正(Black Level Correction)#
工业传感器在无光照条件下的输出值通常不为零,存在一个由偏置电压和**暗电流(Dark Current)**叠加而成的基底信号。例如,某款12位传感器(最大值4095)的黑电平可能为64。如果不减去这一偏置值,所有后续的比例运算都将出现系统性偏差。
校正公式为:
$$R_{linear} = R_{raw} - BL, \quad G_{linear} = G_{raw} - BL, \quad B_{linear} = B_{raw} - BL$$其中 \(BL\) 为黑电平值,通过遮挡镜头拍摄暗帧并取平均获得。校正后的负值应被钳位至零。
线性化处理(去Gamma)#
部分工业相机可能在固件层面对输出信号施加了Gamma校正或其他非线性传输函数,用于适配显示器的非线性特性。对于色度测量应用,必须确保获取的是未经任何Gamma处理的RAW线性数据。
如果相机无法直接输出线性RAW数据,需要测量其光电转换函数(Opto-Electronic Conversion Function, OECF),并构建反向**查找表(LUT)**来恢复信号的线性度。方法是:使用稳定光源,保持光强不变,以不同曝光时间拍摄,绘制像素灰度值与曝光时间的关系曲线——理想情况下应为过原点的直线。
平场校正(Flat-Field Correction)#
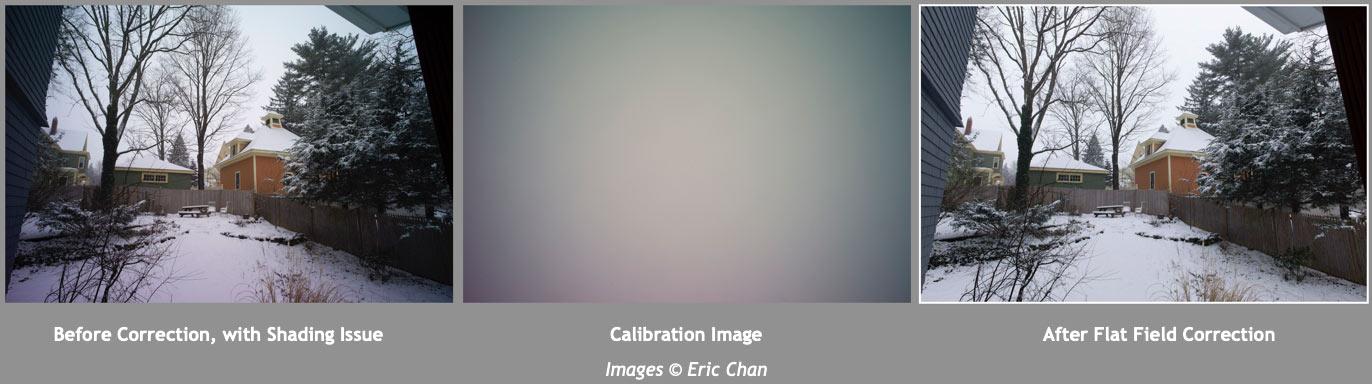
即使在均匀照射下,相机图像也会呈现"中心亮、边缘暗"的非均匀性,主要来源于:
- 镜头渐晕(Vignetting):遵循 \(\cos^4\theta\) 法则的光学衰减
- 像素响应非均匀性(PRNU):传感器制造工艺带来的像素间灵敏度差异
平场校正通过拍摄均匀性优于98%的积分球开口,计算每个像素的增益因子来消除这一偏差:
$$G(x,y) = \frac{\overline{DN}_{center}}{DN(x,y)}, \quad I_{corrected}(x,y) = I_{linear}(x,y) \times G(x,y)$$需要注意的是,平场校正数据与镜头的光圈值(F-stop)和对焦距离强相关。更换镜头参数后必须重新采集平场数据。
核心环节:RGB到XYZ的数学映射模型#
完成辐射度预处理后,相机输出的是线性、均匀的RGB数据。接下来的关键步骤是选择合适的数学模型,建立RGB到CIE XYZ的映射关系。
训练数据采集#
标定流程通常采用"基于目标"的方法,需要准备以下条件:
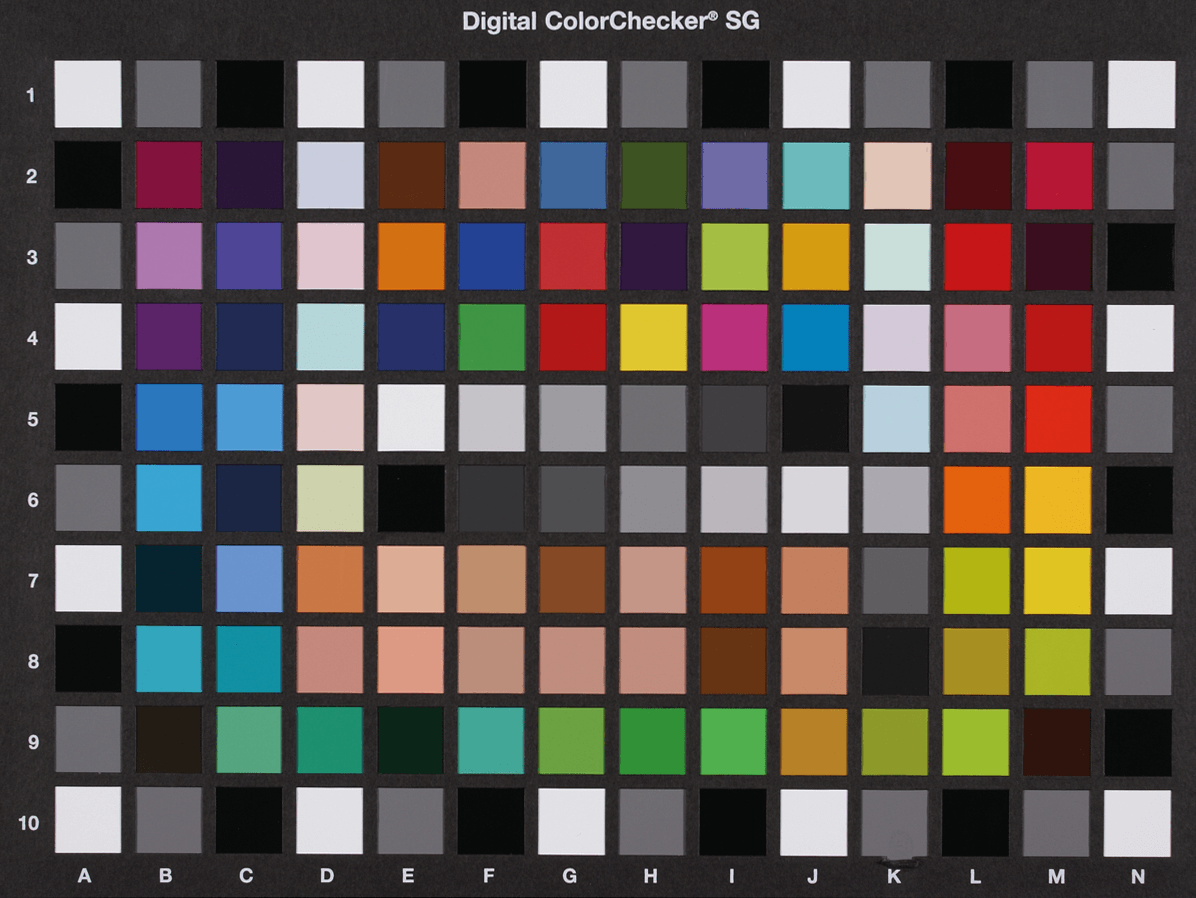
标准参照物:最常用的是X-Rite ColorChecker标准色卡(24色块或140色块的SG版本)。每个色块的标准XYZ值已由高精度分光光度计预先测定。对于LED或显示器测量应用,也可直接使用目标设备显示的特定色块序列。
参考级仪器:使用高精度分光辐射度计(如Konica Minolta CS-2000或Photo Research PR-740)同步测量每个色块的绝对光谱功率分布(SPD),计算标准XYZ值。
几何一致性:相机与参考仪器必须在完全相同的照明条件和测量角度下进行数据采集。
模型一:线性3x3矩阵变换#
最简单的映射模型假设RGB与XYZ之间存在线性关系:
$$\begin{pmatrix} X \\ Y \\ Z \end{pmatrix} = \begin{pmatrix} m_{11} & m_{12} & m_{13} \\ m_{21} & m_{22} & m_{23} \\ m_{31} & m_{32} & m_{33} \end{pmatrix} \begin{pmatrix} R \\ G \\ B \end{pmatrix}$$该矩阵可通过最小二乘法求解。给定 \(N\) 组训练样本对 \(\{(R_i, G_i, B_i), (X_i, Y_i, Z_i)\}\),构建超定方程组并最小化残差的平方和即可得到最优解。
关键特性:线性矩阵保持曝光不变性(Exposure Invariance)——当入射光强度增加 \(k\) 倍时,RGB和XYZ同时按比例增加 \(k\) 倍。这意味着在不同光强条件下,色坐标 \((x, y)\) 保持稳定,这对色度测量至关重要。
精度局限:由于相机的RGB滤光片光谱响应不满足卢瑟-艾夫斯条件(Luther-Ives Condition)——即无法通过线性变换精确匹配CIE配色函数——线性矩阵的色差 \(\Delta E_{ab}^*\) 通常较大(可能超过5),仅适用于粗略分选或Pass/Fail判断。
模型二:多项式回归模型#
为补偿线性模型无法描述的非线性效应(通道间串扰、光谱重叠等),多项式回归通过增加高阶项来提升拟合精度。一个典型的11项二阶多项式扩展为:
$$\mathbf{V}_{poly} = [R, G, B, R^2, G^2, B^2, RG, GB, RB, RGB, 1]^T$$$$\begin{pmatrix} X \\ Y \\ Z \end{pmatrix} = \mathbf{M}_{3 \times 11} \cdot \mathbf{V}_{poly}$$更高阶的19项三阶多项式可以进一步包含 \(R^3, R^2G, R^2B\) 等交叉项,提供更强的非线性拟合能力。
致命缺陷:多项式模型丧失了曝光不变性。由于包含 \(R^2\)、\(RG\) 等非线性项,当光强变化时,高次项的缩放比例与一次项不一致,导致色坐标随亮度系统性漂移。这意味着多项式模型在成像色度计中有严格的使用限制——必须将输入数据归一化到标定时的基准曝光条件下才能使用。
模型三:根多项式回归模型(Root-Polynomial)#
由Finlayson等人提出的**根多项式回归(Root-Polynomial Regression)**是目前成像色度计领域被广泛认可的高精度算法。其核心创新在于引入了如 \(\sqrt{RG}\) 形式的非线性项,在提升拟合精度的同时巧妙地保留了曝光不变性。
数学原理:当光强增加 \(k\) 倍时,\(\sqrt{(kR)(kG)} = k\sqrt{RG}\),因此根多项式项与一次项具有相同的线性缩放特性。
二阶根多项式的特征向量为:
$$\mathbf{V}_{root} = [R, G, B, \sqrt{RG}, \sqrt{GB}, \sqrt{RB}]^T$$三阶扩展可进一步包含 \(\sqrt{R^2G}, \sqrt{R^2B}, \sqrt{RGB}\) 等13个项。
模型四:神经网络与查找表#
对于极端非线性的场景,也有研究者采用小型**多层感知机(MLP)或三维查找表(3D LUT)**来建立RGB-XYZ映射。这些方法可以拟合任意复杂的非线性关系,但通常不保持曝光不变性,且对训练数据量的要求更高,在工程实践中应用有限。
映射模型综合对比#
| 模型 | 数学形式 | 曝光不变性 | 典型色差 \(\Delta E_{ab}^*\) | 适用场景 |
|---|---|---|---|---|
| 线性3x3矩阵 | \(X = aR + bG + cB\) | 是 | 3-8 | 粗略分选、宽带光源 |
| 多项式回归 | 含 \(R^2, RG\) 等项 | 否 | 1-3 | 固定曝光条件下的精密测量 |
| 根多项式回归 | 含 \(\sqrt{RG}\) 等项 | 是 | 1-2 | 成像色度计(推荐) |
| 3D LUT | 三维查找表 | 否 | <1 | 非线性极强的特殊系统 |
| 神经网络 | MLP | 否 | <1 | 大数据量训练的研究场景 |
训练样本的选择策略#
标定模型的精度不仅取决于模型本身,还高度依赖训练数据集的质量和代表性。
ColorChecker色卡标定#
标准的X-Rite ColorChecker色卡包含24个色块,覆盖了色度图上的主要区域。更高端的ColorChecker SG包含140个色块,可以提供更密集的色域覆盖。
优势:操作简便、标准化程度高、可追溯性好。
局限:色卡的反射光谱是宽带光谱,与LED或OLED等窄带光源的光谱特性差异很大。在宽带光源下训练的标定模型,用于测量窄带光源时可能产生显著误差——这正是**同色异谱(Metamerism)**问题的核心体现。
单色LED序列标定#
针对LED测量应用,另一种策略是使用一组波长已知的单色或窄带LED作为训练光源,结合分光辐射度计同步测量其XYZ标准值。
优势:训练数据的光谱类型与实际被测对象一致,在特定LED光源下可获得更高的标定精度。
局限:训练集的色域覆盖范围有限,对超出训练范围的颜色泛化能力较弱;且LED光源的光谱可能随温度和驱动电流发生漂移。
混合策略#
工程实践中通常采用混合策略:先用ColorChecker色卡建立基础映射,再用目标应用中典型的光源样本进行局部优化或验证。对于特定显示器的产线校正,可采用四色矩阵法(Four-Color Matrix Method)——分别测量被测屏幕的红、绿、蓝、白四个纯色画面,计算一个特定于该屏幕光谱的精细校正矩阵。
标定精度的影响因素与局限性#
同色异谱问题:RGB标定的物理天花板#
**同色异谱(Metamerism)**是RGB相机色度标定面临的最根本性限制。两个光谱功率分布不同的光源,可能在人眼中呈现完全相同的颜色(XYZ值相同),但由于相机RGB滤光片的光谱响应与CIE配色函数不匹配,相机可能对这两个光源产生不同的RGB输出,从而导致测量错误。
这一问题的严重程度取决于相机滤光片光谱响应偏离卢瑟-艾夫斯条件的程度,可以用光谱失配误差 \(f_1'\) 来量化。Bayer滤光片的 \(f_1'\) 值通常远高于专业三刺激值滤光片,因此同色异谱误差也显著更大。
关键推论是:当被测光源的光谱类型已知且有限时(例如仅检测RGB三色LED氛围灯),可以通过针对性的训练样本选择来大幅降低同色异谱误差,使RGB标定方案达到工程可接受的精度。但当被测光源的光谱类型多样且不可预知时,RGB相机的色度测量可靠性将大打折扣。
环境条件的敏感性#
标定参数的有效性严格受限于以下条件的一致性:
- 光源:照明光源的光谱功率分布若发生改变,标定模型随即失效
- 温度:传感器暗电流随温度每升高约6-8°C翻倍,红光/近红外区域的量子效率也随温度变化
- 相机参数:光圈、曝光时间、增益等任何参数的变动都会影响线性响应特性
- 镜头:更换镜头意味着整个光学系统的光谱透过率和渐晕特性改变
动态范围与噪声#
工业相机的动态范围(通常60-72dB)远低于专业成像色度计(通常>80dB)。在极高亮度区域,传感器趋于饱和,信号被截断;在极低亮度区域,信号被读出噪声淹没。这两种情况下的色度信息都不可靠。
工程实践中的完整标定流程#
将上述理论整合为一个可操作的标准流程(SOP),关键步骤如下:
| 步骤 | 操作内容 | 关键要求 |
|---|---|---|
| 1. 环境准备 | 暗室环境,相机预热≥30分钟 | 温度稳定、无杂散光 |
| 2. 相机配置 | 关闭自动白平衡、自动增益、Gamma校正 | 确保RAW输出为纯线性 |
| 3. 黑电平校正 | 遮光拍摄暗帧,取平均作为主暗帧 | 曝光时间与测量时一致 |
| 4. 线性度验证 | 变曝光测试,验证DN与曝光时间成正比 | 偏差应<1% |
| 5. 平场校正 | 对准均匀光源拍摄,计算增益矩阵 | 光圈/焦距需与测量时一致 |
| 6. 色度标定 | 拍摄标准色卡/LED序列,建立映射模型 | 参考级仪器同步测量 |
| 7. 绝对亮度定标 | 测量已知亮度的标准源,确定比例系数 | NIST可溯源的标准灯 |
| 8. 验证 | 测量未参与训练的验证色块,计算色差 | 平均 \(\Delta E\) 和最大 \(\Delta E\) |
与专业成像色度计的本质区别#
在评估RGB相机标定方案的工程价值时,必须清醒认识其与专业三滤色片成像色度计在方法论层面的本质差异:
| 维度 | 标定型RGB相机 | 三滤色片成像色度计 |
|---|---|---|
| 测量原理 | 数学模拟:通过软件算法将非理想的光谱响应拟合至XYZ空间 | 物理匹配:通过精密滤光片在硬件层面直接模拟CIE配色函数 |
| 精度基础 | 软件依赖型——受模型质量、训练数据和环境一致性约束 | 硬件定义型——由滤光片光学设计和制造公差决定 |
| 同色异谱抗扰度 | 较低,Bayer滤光片的 \(f_1'\) 值通常>10% | 较高,定制干涉滤光片的 \(f_1'\) 可<3% |
| 空间分辨率 | 高(可达数千万像素) | 通常中等(数百万像素) |
| 动态范围 | 中等(60-72dB) | 高(>80dB,部分可达120dB HDR) |
| 速度 | 快(单次曝光即获取RGB三通道) | 较慢(需依次通过3片或4片滤光片采集) |
| 成本 | 低(相机+镜头,通常数千至数万元) | 高(通常数十万元起) |
核心结论:三滤色片色度计如同一把经过物理刻度校准的标准尺,其测量结果直接可信、可追溯。而标定型RGB相机则是一把弹性标尺——通过参照标准尺来修正自身的非线性和不均匀性,其准确度是有条件的、依赖于修正算法质量的。
结语:理性看待RGB标定方案的工程价值#
通过严谨的色度学标定流程——从黑电平校正、线性化、平场校正等辐射度预处理,到线性矩阵、多项式回归或根多项式回归等色度映射模型的建立——一台普通的RGB工业相机确实可以被赋予色度测量能力,在特定应用条件下达到工程可接受的精度。
然而,这种能力的实现是有条件的。其可靠性建立在以下前提之上:被测光源的光谱类型已知且有限、标定条件与测量条件保持一致、环境温度稳定可控。在这些约束条件得到满足时——例如在已知光谱类型的LED氛围灯检测、特定型号显示屏的产线一致性判定等场景中——RGB标定方案以其低成本、高分辨率和高效率的优势,展现了显著的工程实用价值。
但对于要求绝对色度精度、需追溯至国际标准、或面对光谱类型多样化的复杂测量任务,基于物理匹配原理的专业成像色度计仍然是不可替代的基准工具。在选择技术路线时,工程师需要根据具体应用的精度需求、被测对象的光谱特性和项目预算,做出理性的权衡决策。
常见问题#
Q1: 根多项式回归相比普通多项式回归的核心优势是什么?为什么成像色度计推荐使用根多项式?#
根多项式回归(Root-Polynomial Regression)的核心优势在于它在提升非线性拟合精度的同时,保持了曝光不变性(Exposure Invariance)。普通多项式回归虽然能通过引入 \(R^2\)、\(RG\) 等高阶项获得更好的拟合效果,但这些非线性项在光强变化时的缩放比例与一次项不一致——例如当光强增加 \(k\) 倍时,\(R^2\) 变为 \(k^2R^2\),而 \(R\) 变为 \(kR\),导致色坐标随亮度系统性漂移。根多项式通过引入 \(\sqrt{RG}\) 形式的项巧妙地解决了这一问题,因为 \(\sqrt{(kR)(kG)} = k\sqrt{RG}\),所有项都保持线性缩放特性。在成像色度计的实际应用中,被测场景中不同区域的亮度差异很大,曝光不变性确保了无论亮度如何变化,色坐标计算都能保持稳定可靠。因此,根多项式回归是目前成像色度计领域被广泛认可的RGB-to-XYZ映射算法首选方案,典型色差 \(\Delta E_{ab}^*\) 可控制在1-2范围内。
Q2: 平场校正的数据在哪些条件下会失效?实际操作中需要注意什么?#
平场校正数据的有效性与光学系统的配置参数强相关,主要在以下条件变化时失效:(1)光圈值(F-stop)改变——不同光圈下镜头渐晕的程度和分布形态不同,\(\cos^4\theta\) 衰减特性也会随之变化;(2)对焦距离改变——焦距变化会影响镜头内部光线的传播路径,导致渐晕和像面照度分布发生变化;(3)更换镜头——不同镜头的光学设计、镀膜特性和渐晕特征完全不同;(4)传感器温度显著变化——温度变化会导致像素响应非均匀性(PRNU)发生漂移。实际操作中,应在每次测量前确认平场校正数据对应的光学配置(光圈、焦距、镜头型号)与当前测量设置完全一致。建议为常用的光学配置组合分别采集和存储平场校正数据,并在环境温度变化超过5°C时重新采集。平场参考光源应使用均匀性优于98%的积分球开口,避免使用均匀性不足的替代光源。
Q3: 使用ColorChecker色卡标定后直接测量LED光源,为什么误差可能很大?#
这个问题的根源是**同色异谱(Metamerism)**效应。ColorChecker色卡是一种反射式色样,在照明光源下呈现的是宽带连续光谱的反射光。而LED光源的发射光谱通常是窄带的——例如RGB-LED具有三个独立的窄带峰,白光LED则是蓝光窄峰加黄色荧光粉的宽带发射。由于RGB工业相机的Bayer滤光片光谱响应不满足卢瑟-艾夫斯条件(即无法通过线性变换精确匹配CIE配色函数),当被测光源的光谱类型与训练样本的光谱类型差异较大时,同一组标定矩阵在两种光谱上的映射误差会有显著差异。简言之,在宽带光谱上训练出的映射关系,无法准确推广到窄带光谱上。解决这一问题的工程方法包括:使用与被测LED光谱类型一致的训练样本进行针对性标定、采用四色矩阵法为特定显示器建立专用校正矩阵、或在已知被测光谱类型的前提下引入光谱失配因子(SMCF)校正。
本文为成像色度计技术知识库系列文章。